

日本電気株式会社
NEC東芝スペースシステム株式会社
1969年7月20日(UT)、アポロ11号の月着陸船(イーグル号)船長ニール・アームストロング宇宙飛行士の“小さな一歩"から始まった有人月面探査は、1972年12月17日のロン・エバンス宇宙飛行士(アポロ17号)以来、その歩みを止めていましたが、2004年1月14日にNASAの新宇宙開発政策が発表され、宇宙ステーション計画を引き継ぐ国際的プロジェクトとして、その新たな歩みを始めました。2007年9月14日に打上げられた我が国の月周回衛星(「かぐや」SELENE)は、まさにそうした国際的な月面探査活動の先陣といえます。
1960-70年代の月探査は、米ソ間の冷戦を背景としていましたが、今米国が進めている有人月探査計画には、ロシア、欧州のみならず、「かぐや」で先陣を切った日本、10月24日に嫦娥1号を打上げた中国、2008年にチャンドラヤーンの打上げを計画しているインド等のアジア諸国も参加を計画しており、15世紀の大航海時代につづく、人類の新たなる宇宙大航海時代の到来を期待させます。
その先陣を果たした「かぐや」は、宇宙航空研究開発機構(JAXA)殿のご指導の下、当社が衛星バスシステムのプライムメーカとして開発を担当しました。
打ち上げ時の重量は約3トン、15種類の観測ミッションを搭載した世界最大級の無人月探査衛星で、我が国の月周回衛星としては1990年1月24日に打上げられたMUSES-A(ひてん・はごろも)に続くものです。実は、「ひてん・はごろも」も当社が開発を担当しており、これらの開発と運用で得られた多くの知見や技術が「かぐや」の開発と運用に活かされ、15種類の観測ミッションの実行を支えています。
本稿では、「かぐや」の概要やミッションプロファイルを紹介します。
「かぐや」は、主衛星と2機の子衛星(「おきな」と「おうな」)の3機の衛星で構成され(図1、2参照)、打上げ時の総重量は3020kg(約3トン)、ロケット搭載時の外形寸法は、2.1×2.1×4.8mです。片翼キャント型の太陽電池パドルを持ち、発生電力は約3.5kWです。(表1参照)
主衛星は、月周回円軌道に入った後、子衛星が搭載されていた面から前方方向に約12mの長さをもつLMAG(注1)アンテナを、四方に各々約16mの長さのLRS(注2)アンテナを展開しますので、軌道上での空間寸法は約23×24×3mとなります。
子衛星は、それぞれ約50kgで、約1×1×0.65mの八角柱の形状です。八角柱の外周面が太陽電池パネルとなっており、発生電力は約50wです。
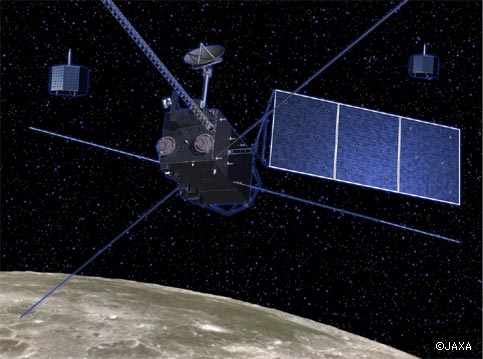
図1:かぐやの軌道上概観

図2 実機外観(筑波宇宙センター)
| 打上予定 | 平成19年(2007年) 9月14日 | |
| 主要諸元 | ||
|---|---|---|
| (主衛星) | 質量: | 約3.0トン(打上げ時) |
| 構体外形寸法: | 約2.1×2.1×4.8m | |
| 発生電力: | 約3.5 kW(最大) | |
| ミッション期間: | 約1年 | |
| 観測軌道: | 高度100km/傾斜角90度の円軌道 | |
| (子衛星) | 質量: | 約50kg × 2機 |
| 構体外形寸法: | 約1.0×1.0×0.7m(八角柱状) | |
| 発生電力: | 約70W | |
| ミッション期間: | 約1年 | |
| 観測軌道(分離時): | ||
| リレー衛星: | 高度100km×2400kmの楕円軌道 | |
| VRAD衛星: | 高度100km×800kmの楕円軌道 | |
| 搭載ミッション機器・・・15種類の搭載ミッション | ||
| 蛍光X線分光計、ガンマ線分光計、マルチバンドイメージャー、スペクトルプロファイラー、地形カメラ、月レーダサウンダー、レーザ高度計、月磁場観測装置、粒子線計測器、プラズマ観測装置、電波科学、プラズマイメージャ、リレー衛星中継器、衛星電波源、ハイビジョンカメラ | ||
「かぐや」は、H-ⅡA13号機により打上げられましたが、民営化(三菱重工株式会社殿ご担当)による最初の打上げということでも注目されました。
前日までは雨模様で、打上げは危ぶまれていましたが、打上げ当日には晴天となり、予定通り平成19年9月14日午前10時31分01秒に打上げられました。(図4参照)比較的湿度が高かったためか、ロケット先端部分に打上時の衝撃波によって生じた雲の環がみえますが、これが視認できるのはとても珍しいことだそうです。(図5参照)
月に向けて衛星を打上げるのは、回転する台座から玉を投げ、台座の周囲を回る的に当てるようなもので、地球の自転と月の公転を考慮して打上げ時刻を決めます。また、衛星の軌道計算も、地球のみならず月や太陽の引力も考慮する必要があります。少しでもずれると軌道修正に要する燃料が膨大となるため、予定時刻ジャストに打上げることが要求されます。このため打上関係者は、地球周回衛星の打上げ以上の緊張を強いられましたが、結果としては予定通りに打上げられ、投入軌道、投入姿勢ともに予定通りのものでした。 あらためて打上関係者各位にお礼をもうしあげます。

図4 月探査衛星(SELENE)の打上げ風景

図5.打上時の衝撃波による雲の環
ロケットにより遠地点距離約23万kmの長楕円の地球周回軌道に投入された「かぐや」は、ロケット分離後直ぐ太陽電池パドルを展開し、その後三軸姿勢制御の確立、ハイゲインアンテナの展開等を行いました。 地球を1周回した後、近地点近傍で推力約500N(ニュートン)の2液式エンジンにより遠地点距離を39万km(月の軌道半径)に上げる軌道制御を行いました。(図3参照)この長楕円軌道でさらにもう一周回半地球を回り、月周回軌道投入作業(LOI:Lunar Orbit Injection)に備えました。
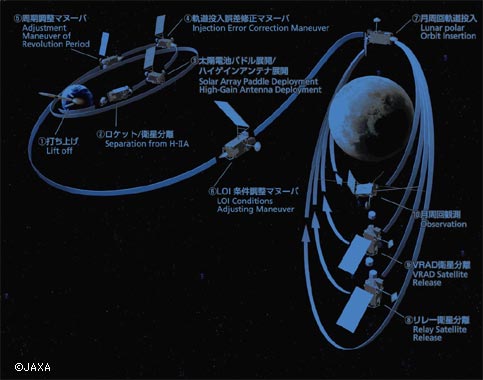
図3:月探査衛星のミッションプロファイル
図6は、最後の近地点を通過後、地球に別れを告げる「かぐや」からハイビジョンカメラが撮えた地球の映像です。
月に近づくにつれ、衛星は月の引力で加速されます。そのままではスイングバイをして更に遠くへと飛ばされてしまいますので、月周回軌道に入れるために減速の軌道制御を行う必要があります。「かぐや」も10月4日に月から約100kmに近づいたところで、500Nエンジンを使って減速(ブレーキ)の軌道制御を行い、約100×11700kmの月周回楕円軌道に投入しました。その後、順次、遠月点高度を下げる軌道修正を行い、10月9日に100×24000kmの軌道上でリレー衛星(子衛星:おきな)を、続いて12日に100×800kmの軌道上でVRAD衛星(おうな)を切り離し、19日に主衛星を100±30kmの月観測円軌道に投入しました。

図6 月遷移軌道上でハイビジョンカメラが撮った地球
その後、10月28日から順次、LMAGアンテナ、LRSアンテナ、UPI(注3)等のミッション機器を伸展・展開し、11月12日現在、各ミッション機器の機能性能確認(チェックアウト)が進められています。
15種類のミッションが、今後、数多くの新しい発見をもたらしてくれるものと思います。「かぐや」が観測する地形データや月の土壌組成データは、世界中の多くの研究者からも注目されており、その成果が待ち望まれます。
図7に、11月7日に公開されたハイビジョンカメラによる月の映像を示します。
当社も、引き続き、かぐやの運用を通して研究者の支援を行うとともに、来る月着陸ミッションに向けた情報の収集に関しても積極的にJAXA殿を支援してまいります。

図7 月の北極付近(100km高度からハイビジョンカメラで撮影)
以上
(注1)LMAG: Lunar Magnetometer 月磁場観測装置
(注2)LRS: Lunar Radar Sounder 月レーザーサウンダー
(注3)UPI: Upper-atmosphere and Plasma Imager プラズマイメージャー